The premise of this group CAPSTONE project was to create a
circuit that did the following: the circuit would take in the AC
signal generated by the windmill (an external fan spins the windmill)
and determine whether the windmill is being spun too slowly or quickly
via LED’s. An additional LED, which is always on, dims or brightens depending
on how fast the windmill spins.
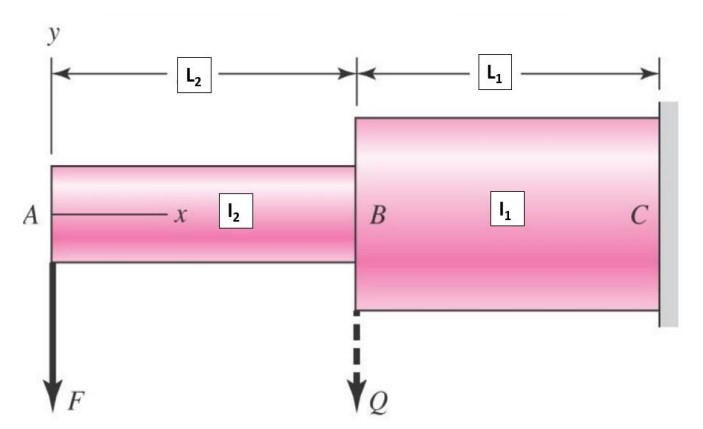
Before constructing our circuit on a breadboard, we first built the circuit in NI Labview.
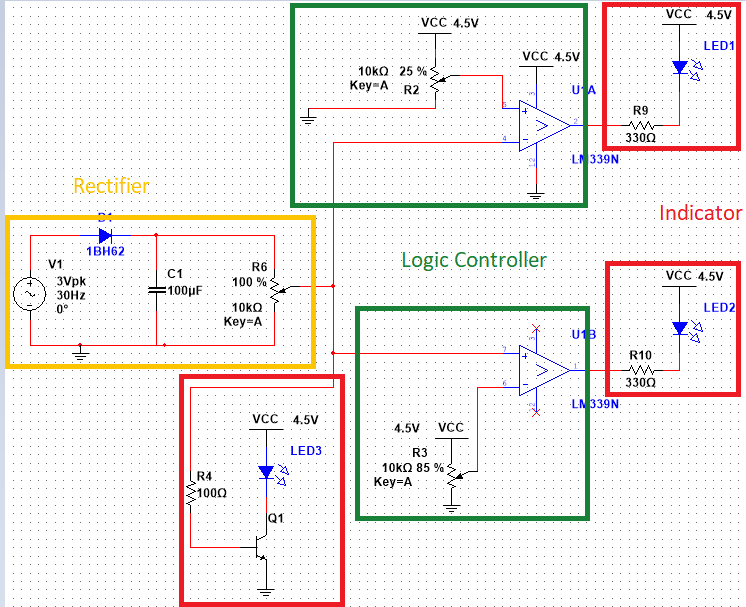
As seen in the picture above, the circuit we made was composed of 3 systems: a rectifier,
logic controller, and indicator.
The rectifier was made using an external DC voltage source, capacitor, and resistor.
By placing these components in parallel, we were able to turn the AC signal generated by the
windmill into a usable DC signal.
The rectified signal was fed into logic controllers and an indicator. The logic controllers were
constructed with a comparator, a potentiometer and external power source that served as a voltage divider.
The voltage from the potentiometer and that of the rectified signal were compared. Depending on which voltage
is greater, the signal would or would not be allowed through. For this reason, two logic controllers were used.
One classifies a signal that is too quick and the other classifies a signal that is too slow.
The bottom indicator was constructed with a transistor. With the transistor, depending on
the voltage of the rectified signal, the LED would dim or brighten.
This project was a great learning experience in working with circuits. In addition,
it was a good opportunity to test the knowledge we gained through the semester. Building
the circuit was like solving a puzzle, it was quite enjoyable.
See Full Poster